



履帶機器人擺臂電機技術參數與應用
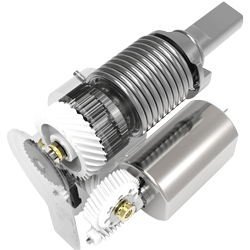
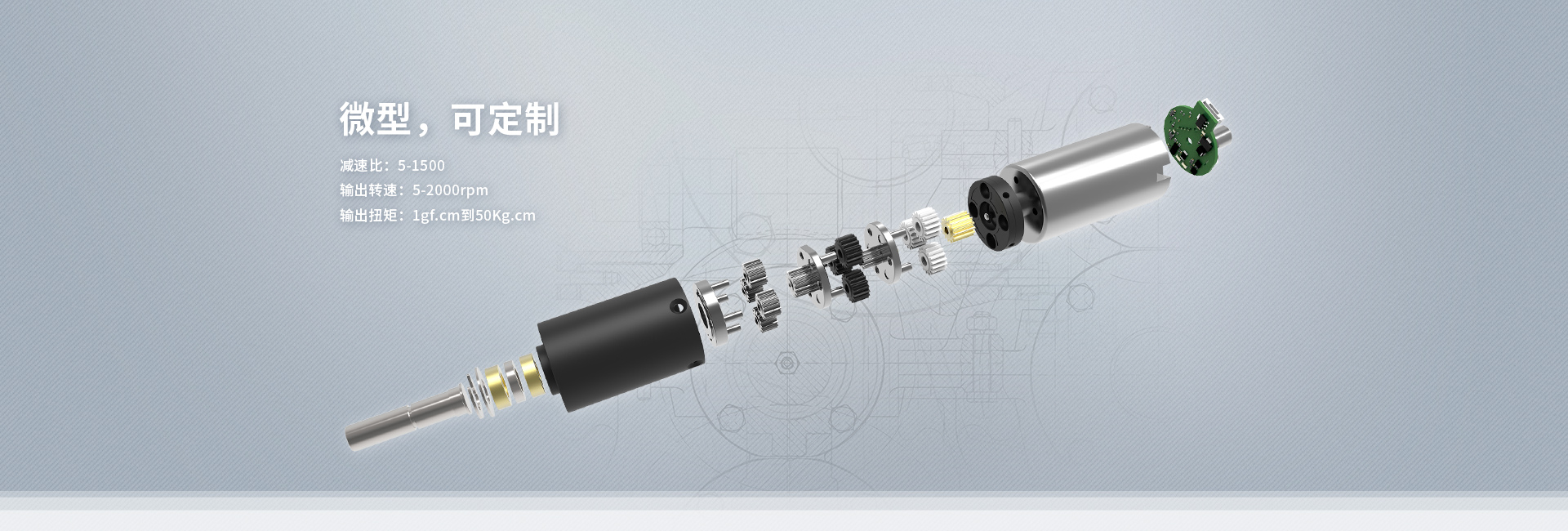
履帶機器人擺臂電機的全稱是履帶機器人擺臂減速電機,屬于小功率微型減速電機,功率在50W以下,電壓在24V以下,直徑規格在38mm以下的小功率減速機,主要結構由驅動電機、減速齒輪箱組裝而成,具備驅動、減速、提升扭矩功能;為了滿足不同的履帶機器人擺臂電機要求,通常采用定制電機技術差參數服務,例如驅動電機的結構類型、輸出轉速、功率、電壓、直徑規格等技術參數,減速齒輪箱的驅動減速比、輸出扭矩、回轉精度、驅動噪音、使用壽命等技術參數是定制開發而成;兆威機電股份有限公司專注于研發、設計、制造履帶機器人擺臂機器人電機服務,提供定制開發服務。
履帶機器人擺臂電機技術參數:
減速齒輪箱類型:塑膠行星齒輪箱
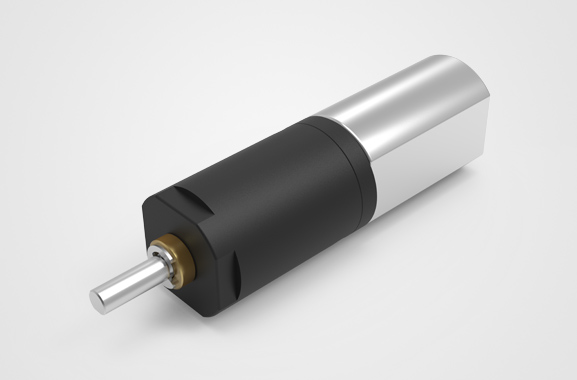
產品型號:ZWBPD020020
產品規格:Φ20MM產品(可定制)
電壓:6-24V(可定制)
產品電流:80mA(可定制)
減速比:4—1296(可定制)
輸出轉速:14-4521 r/min(可定制)
產品特點:規格小、噪音低、壽命長、回轉精度高、扭矩大、
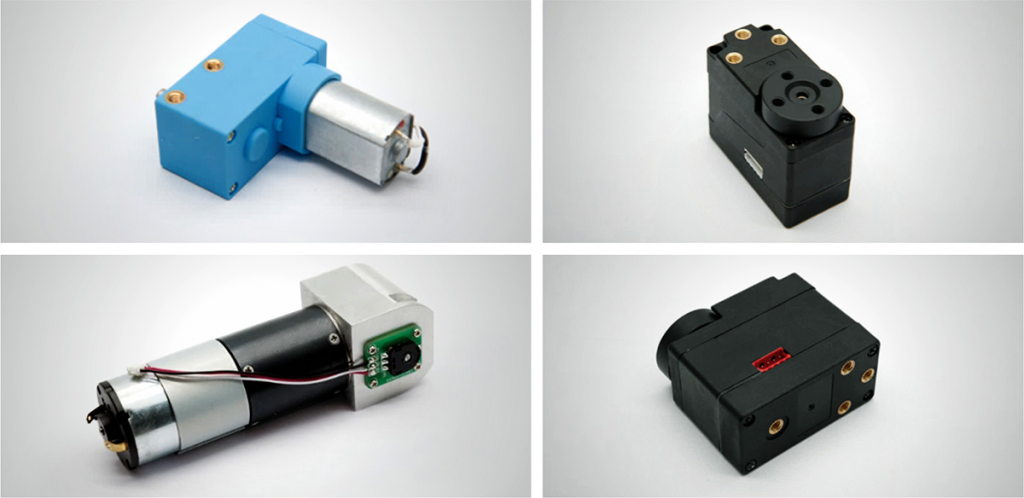
應用案例:
項目名稱:智能機器人手臂關節驅動齒輪箱(適應性、自主性解決方案)
項目難題:提智能機器人手臂關節的智能性和適應性、自主性
技術方案:威微型齒輪箱研發生產,通過發展耐磨材料技術、加工工藝優化技術、潤滑技術、裝配技術、可靠性及壽命檢測技術以及驅動機理的探索,發展適合機器人應用的率、低重量、長期免維護的系列化減速器(齒輪箱)大大提了智能機器人感知與識別、機構與驅動、控制與交互等方面的性能。
解決方案:兆威齒輪箱減速驅動方案應用于智能機器人的多傳感器系統,提了智能機器人的多傳感信息耦合技術精密度。
生產廠家
深圳市兆威機電股份有限公司是一家研發、生產齒輪驅動機構產品的企業,為客戶提供驅動方案設計、零件模具設計和制造、零件生產和集成裝配的定制開發服務。




