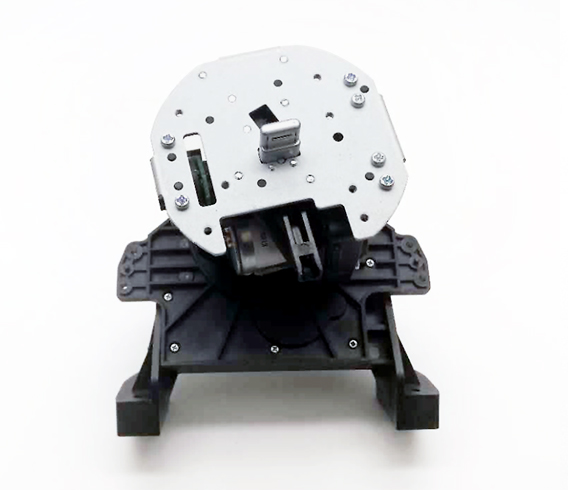


機器人關節應用

機器人搭配兆威行星齒輪關節電機, 可大大提高機器人的品質和效率。我們的機器人關節齒輪擁有二級、三級、四級驅動變化可根據機器人電機的設計需求更換減速比及調整齒輪箱的輸入轉速及力矩。此外,我們生產的機器人電機齒輪箱具有低電壓、低功率、低轉速、低噪音、壽命長、微型、高扭矩的特性,更好滿足六自由度機器人的驅動需求。
威
行
星
齒
輪
關
節
電
機
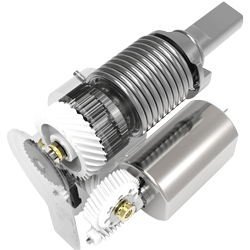
機器人關節減速機的驅動效率和降噪需求,通常需要經過復雜的調試才能提升,為了解決此問題,兆威在進行機器人關節齒輪模具設計時,優化齒輪變位系數和行星齒輪齒干涉校驗,預防和改善關節電機的效率、噪音等問題,讓機器人關節運動更加靈活。

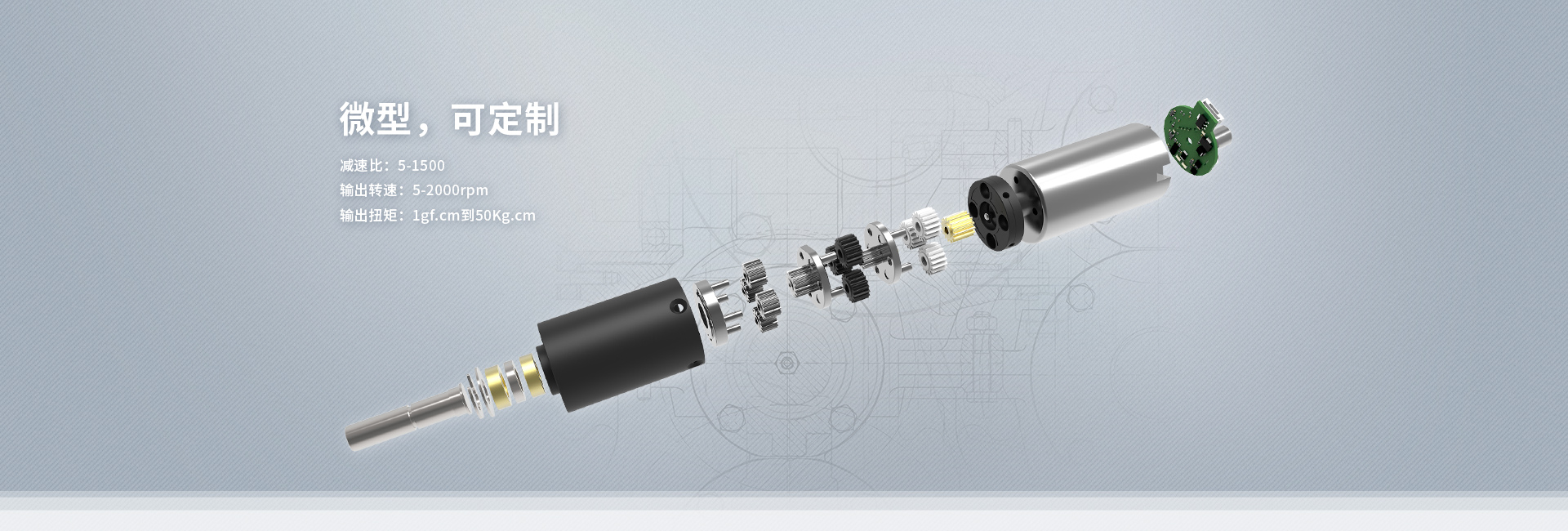
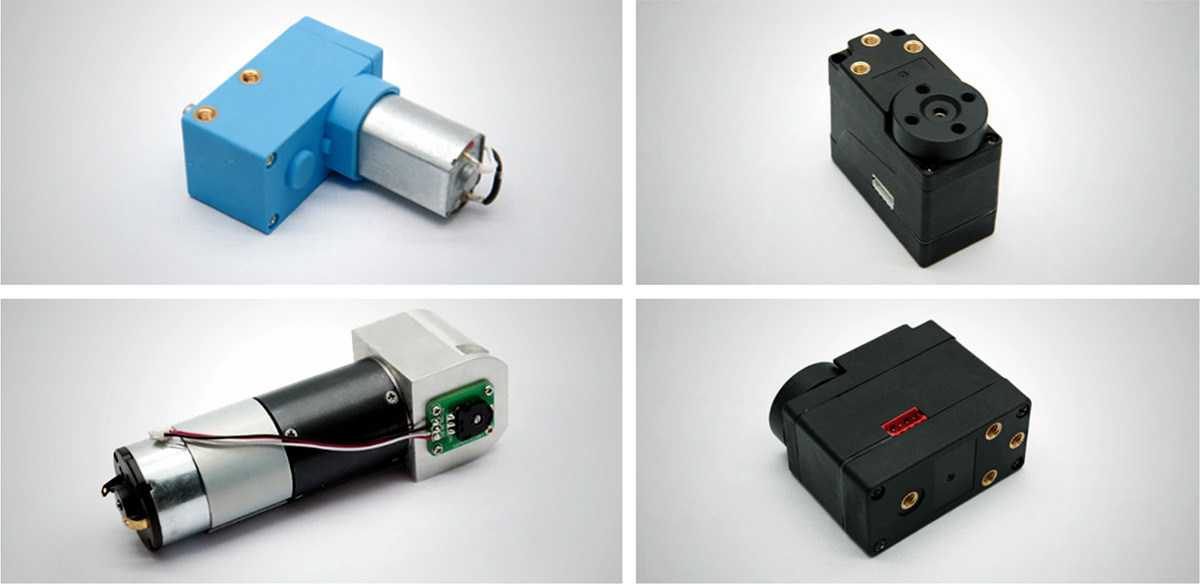
兆威機器人微型關節齒輪箱研發生產,通過發展耐磨材料技術、加工工藝優化技術、潤滑技術、裝配技術及壽命檢測技術以及驅動機理的探索,提高了智能機器人感知與識別、機構與驅動、控制與交互等方面的性能。 全系列精密機器人用減速電機行星齒輪箱,直徑3.4mm-38mm,功率:0.01-40W,輸出轉速5-2000rpm,減速比5-1500,輸出扭矩1gf.cm到50Kg.cm。 機器人關節齒輪箱電壓,轉速和力矩一般都是根據客戶的需求來定的,力矩要求越大,齒輪箱所匹配的電機就越長,減速比也越大,單體馬達的轉速和功率也是可以調整的,我們可以提供按需定制。
場
趨
勢
隨著德國提出的“工業4.0”的概念及5G技術開發以來,制造業逐漸由傳統的勞動密集型產業向智能化、機械化的技術密集型轉變,智能制造大勢所趨。 與此同時,當前我國智能制造領域的發展和廣度日益提升,以新型傳感器、智能控制系、工業機器人、自動化成套生產線為代表的智能制造產業體系初步形成。機器人領域的發展趨勢更為客觀,機器人驅動技術的要求也更為精密,兆威可以根據不同客戶的需求提供個性化的定制服務。