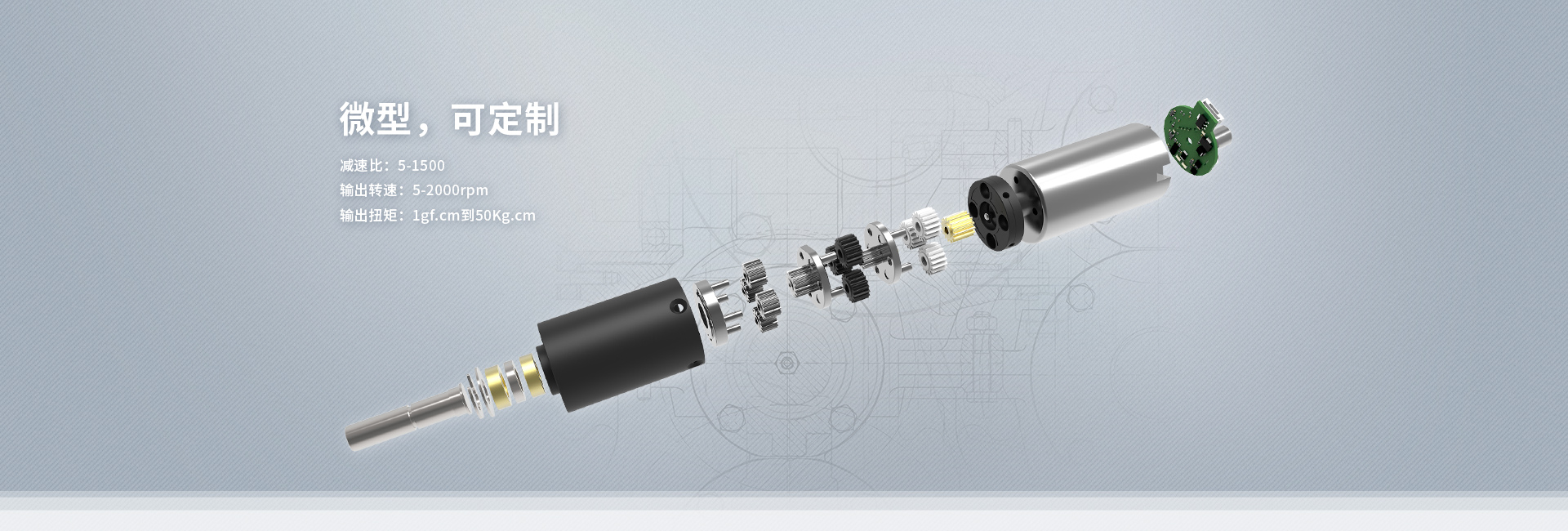
五金行星齒輪箱
塑膠行星齒輪箱
正齒輪箱
直角電機齒輪箱
直流減速電機
空心杯電機
有刷減速電機
無刷減速電機
步進減速電機
滾筒電機
智能通訊驅動
智能汽車驅動
智能醫療驅動
智能家居驅動
智能電子驅動
智能機器人驅動
智能工業裝備驅動
汽車類
醫療驅動
醫療及個人護理 美容養生運動健康
通訊驅動
家居驅動
廚衛門窗 智能家電 線性驅動
3C電子驅動
機器人驅動
工業裝備驅動
攝像頭驅動系列
方案設計定制
智能物流應用場景
智慧醫療應用場景
智慧城市應用場景
智能家居應用場景
智能汽車應用場景
智能通訊應用場景
智能機器人應用場景
設計實力
研發實力
生產實力
品質實力
行業資訊
常見問題
兆威展會
兆威動態
視頻&專題
招標中標發布
在線方案定制
關于我們
聯系我們
以輪廓電機中行星驅動系統為研究對象,考慮時變嚙合剛度、嚙合相位和當量嚙合誤差等影響因素,建立了系統的運動微分方程,并運用Runge-Kuttge法求解得到系統傳遞誤差。基于傳遞誤差曲線,分析了各類誤差和支撐剛度變化對系統傳遞誤差幅值的影響,并對誤差初相位進行優化。
2017-11-02
針對常用組合修行方法無法同時滿足擺線輪承載、低回差要求的問題,提出一種偏心距組合修行方法。在運用三坐標測量儀對RV-40E型減速器擺線輪進行精密測量的基礎上,基于二乘法對測量所得的擺線輪齒形坐標參數進行圓弧擬合,并得到了相應的擺線輪齒形方程。然后,以所得齒形方程曲線為目標齒廓
2017-10-31
為解決管道機器人過彎時驅動輪與管壁間的相對滑動問題以及機體對管徑尺寸的適應問題,設計了采用一個電機進行驅動并具備差動能力和自適應變徑尺寸的適應能力的管道機器人。分析了機體差動機構的驅動特性,理論推導了管道機器人變徑機構工作狀態時的受力方程,得到了機器人運行時驅動輪與管壁之間的力學關系式
2017-02-24
重載齒輪在驅動過程中嚙合面由于相對摩擦會產生大量的熱,導致齒輪面溫度提升、盈利增加、可靠性降低,而間接偶合法對熱流邊界加載區域不能確定。采用直接耦合進行齒輪熱-結構耦合分析,得到了齒輪嚙合動態溫度和應力場分布;并對影響耦合效應的摩擦因素、相對轉速、齒輪模數進行了討論。結果表明,齒輪模數對嚙合溫升、熱應力影響較大,對大模數齒輪設計時需要考慮熱-結構的耦合效應。
2016-08-31
介紹了諧波減速器的扭轉剛度與回差的測試裝置,并對其進行實驗研究。固定諧波減速器的輸出軸,在輸入軸施加單向漸變力矩并利用量角儀測量輸入軸轉動角度;對測量數據進行處理,擬合出輸入軸遲滯曲線方程。通過多次測量實驗驗證,建立的遲滯曲線方程與多次實際測量的誤差在3.8%以下;不同力矩值加載的結果顯示,諧波齒輪的回差主要是由驅動鏈間的間隙、柔輪的變形滯后、各零件的制造和安裝誤差等造成的。
2016-08-23
為了了解某型汽車變速器的振動情況,以該型汽車為研究對象,對其進行多工況下振動信號測試與分析,獲得了變速器振動貢獻較大的頻率;并將分析結果與車載模態實驗數據進行對比,確定了容易引起變速器共振的頻率,為采取措施避開該頻率、降低變速器的振動及整車的優化設計奠定了基礎。
2016-08-19
針對內平動齒輪減速器的振動測試問題,提出了基于虛擬儀器的內平動齒輪減速器振動測試與分析系統,通過測試試驗驗證了該系統的可行性和正確性。測試結果表明:各測點處的振動幅值與轉速成正比;在同等轉速不同負載情況下,大振幅基本不變,但均方值有明顯的增加;
2016-08-18
爬樓輪椅按照原理劃分為幾種,包括履帶式,行星輪式和腿足式等。主要分析了行星輪式爬樓輪椅的運動過程,指出了當前爬樓輪椅存在的不足,并提出了一種采用同心軸達到不同驅動方式的驅動方案,可以使輪椅更穩定地實現爬樓運動。使用CATLA軟件進行了結構的設計以及運動仿真模擬,驗證了設計方案的可行性。
2016-08-11
通過對機器人的運動軌跡準確跟蹤控制,能夠有效提升機器人路徑規劃和自主定位的準確性。機器人在運動過程中運動軌跡受到小擾動分段線性誤差的影響,機器人系統是一個多變量非線性系統,傳統的遺傳算法進行運動軌跡跟蹤控制在邊界層出現穩態跟蹤誤差。針對以上問題提出一種基于改進遺傳算法的機器人運動軌跡跟蹤控制算法。
2016-08-10
驗證碼(*):???60 ⁄ = 6
首頁
電話咨詢
在線客服
菜單